Drones:
Over the past seven years, I have honed my expertise in electrical engineering through the construction and operation of more than ten UAV quadcopter drones. This experience has equipped me with a diverse skill set, including a strong command of software and command-line tools for configuring drone systems, an understanding of control systems including control loops and PID controllers, proficiency in signal processing through analog and digital filters, and the use of GitHub repositories for version control. I have also demonstrated a comprehensive grasp of wireless communication by working with frequencies and utilizing radio transmitters and the FPV (First Person View) system. My hands-on mechanical skills, including soldering and tool usage, complement my electrical knowledge, while my understanding of the physics behind drone flight underscores my commitment to the field of electrical and controls engineering.


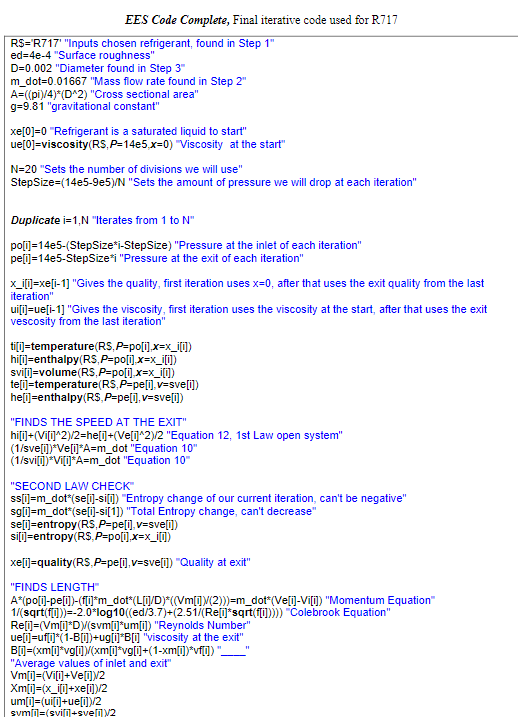
Thermodynamics Capillary Tube:
Collaborated with a team of peers to engineer a capillary tube tailored for use in a refrigeration cycle. This project involved adhering to specific constraints, including a fixed one-meter length, stringent power consumption limits, minimal heat transfer from the surrounding air, and adhering to a predetermined temperature range within the cycle. To achieve these goals, we employed iterative coding techniques within EES (Engineering Equation Solver) software. Through this endeavor, I not only applied the fundamental principles of the First and Second Laws of Thermodynamics but also delved into the practical use of thermal efficiency equations. Moreover, I gained valuable experience in utilizing advanced computer software to tackle intricate systems of equations replete with numerous variables and evolving parameters. My proficiency in implementing iterative code to optimize a function was a direct result of this enriching project.

Drone Motor:
Using SOLIDWORKS, I was able to reverse-engineer the drone motor that is shown above. Construction involved measuring the part using measuring devices and dimensioning the drawing in SOLIDWORKS.



Autonomous Robot:
Collaborated with a team of engineering students to design, code, and deploy an autonomous robot capable of navigating a designated course. I was responsible for the controls and localization subsystem, where I utilized an Arduino to develop a custom PID algorithm for precise robot control. This subsystem was integrated with a Raspberry Pi-based computer vision module to ensure accurate localization and navigation. Leveraging my prior knowledge of PID systems, I fine-tuned the robot to achieve a fast response time with no overshoot. Our robot successfully completed the course efficiently, earning full points.



Probabilistic Forecasting:
Designed a forecasting model using Fourier Series decomposition. Utilized training data to test model and use FFT and decomposition. We then used cross correlation to match our trained model with the testing data to get a model that worked using Fourier.
